Chapter 2 of the Manual of Airborne Topographic Lidar, titled "An Overview of ALS Technology", provides a broad introduction to the operating principles and key elements of Lidar, and then discusses the specifics of several existing Lidar systems. Since it contains 90 dense pages of information, I'll break my notes on it into several posts.
Operating Principles
- LASER - Light Amplified by Stimulated Emission of Radiation.
- Lidar works with light in electromagnetic spectrum from ultraviolet through infrared.
- Wavelengths are chosen with regard to range-performance, atmospheric or water absorption, eye-safety, and reflectivity of lased materials.
- Lasers are nearly monochromatic (they emit light within an extremely narrow band of wavelengths).
- The emitted wavelength is a function of the material in which the light is stimulated, so wavelength vs. material tables can be produced, like this one:
- When laser light strikes a surface, parts of the light are:
- transmitted
- absorbed
- reflected
- The distribution of these 3 parts is a function of the lased surface and the wavelength of the beam (see graph below for example distributions of common earth surfaces).
- All lidar systems are comprised of 2 parts:
- transmitter emitting laser pulses
- optical receiver detecting backscattered pulse
- The illustration below shows a simplified model of the laser ranging principle:

which is represented by the equation:
Δt = 2R/c
Δt is the time between when the laser pulse is emitted and when its backscattered pulse reaches the receiver. c is the speed of light, which is approximately 299700 km/s in the earth's atmosphere. Solving for the range, R, we get:
R = Δt·c/2
so the range is half the product of the elapsed time and the speed of light.
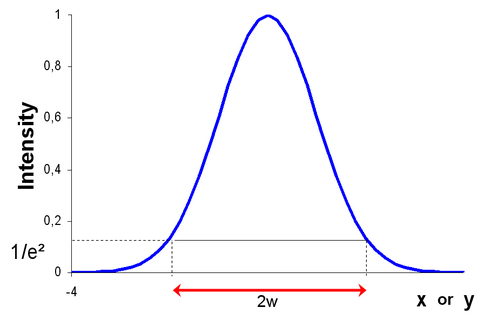
- The square wave idealization is not a very realistic representation of an actual laser pulse, which is much more closely modeled by a Gaussian wave like this:The text discusses in some detail how this waveform is analyzed to determine the pulse. One common way this is done is referred to as full width half maximum (FWHM), which is the pulse duration at 50% or more of its peak intensity. Two other common measurements are 1/e and 1/e2 (shown in the above illustration) of peak intensity.


{kind=link}
Additional Resources
- Light Detection and Ranging (LiDAR) (slides from Portland State University)
- Optical Remote Sensing Systems (slides by Joseph A. Shaw, Montana State University)
- Lidar 101: An Introduction to Lidar Technology, Data, and Applications (NOAA)
- The Basics of LiDAR - Light Detection and Ranging - Remote Sensing (NEON Education website)
No comments:
Post a Comment